
ВСТУПЛЕНИЕ
Пожалуйста, внимательно прочитайте это руководство, прежде чем использовать радиоуправляемую модель квадрокоптера с электродвигателями (в дальнейшем Модель). Мы рекомендуем, чтобы Вы держали это руководство рядом для дальнейшей настройки и обслуживания Модели.
ВНИМАНИЕ: Неправильное обращение с Моделью может привести к повреждению квадрокоптера или к получению травм людей, домашних животных.
Квадрокоптер на радиоуправлении — это прежде всего технически сложный продукт для хобби, а не просто игрушка. Квадрокоптер cheerson cx20 имеет довольно большой размер, поэтому существует риск нанесения ран окружающим людям, домашним животным и т.д., помните об этом.
В случае возникновения вопросов, свяжитесь с менеджером магазина MEEKE.RU или попросите помощи у опытного пилота прежде, чем попытаться управлять квадрокоптером в первый раз.
Для полетов выбирайте просторное помещение или улицу вдали от людей, следите, чтобы на пути пилота не было электрических проводов и других предметов и объектов, которые могут повредить Модель. Не управляйте квадрокоптером в пределах близости людей. Помните, что пилоты ответственны за свои действия и повреждения или раны, нанесенные другим людям.
МЕРЫ ПРЕДОСТОРОЖНОСТИ ПРИ ЗАПУСКЕ КВАДРОКОПТЕРА Cheerson cx20
1. Общие положения.
Модель относится к технически сложным устройствам спортивного направления и хобби. В случае отсутствия достаточного опыта пилотирования подобных Моделей используйте для самоподготовки соответствующую программу-симулятор или обратитесь к более опытному пилоту или инструктору для помощи в первых полетах.
Модель является источником повышенной опасности. При эксплуатации Модели следует строго соблюдать приведенные положения Техники Безопасности. Несоблюдение Техники Безопасности эксплуатации Модели может привести к повреждению Модели, повреждению окружающих предметов и привести к телесным повреждениям.
2. Ограничения и рекомендации:
— Модель не является детской игрушкой. Эксплуатация модели разрешается детям с 14 лет под наблюдением родителей.
— Модель является источником повышенной опасности для окружающих.
— Запрещается эксплуатация Модели в местах массового скопления людей.
— Минимальное безопасное расстояние до Модели не менее 3-х метров.
— Запрещается эксплуатация Модели при наличии технических неисправностей в Модели или системе управления Модели.
— Запрещается управление Моделью лицами в нетрезвом состоянии или в состоянии наркотического опьянения.
3. Перед каждым запуском Модели:
— Убедитесь, что бортовой аккумулятор Модели и аккумулятор передатчика заряжены. При недостаточной зарядке эксплуатация модели запрещена.
— Убедитесь, что Модель технически исправна и не имеет механических повреждений. При наличии неисправностей или механических повреждений эксплуатация модели запрещена.
— Убедитесь в устойчивой работе системы радиоуправления Моделью, в отсутствии радиопомех. При неустойчивой работе системы радиоуправления эксплуатация Модели запрещена.
4. Запуск Модели:
— Включите передатчик.
— Включите бортовую плату Модели (подключите аккумулятор).
— Убедитесь в правильной работе механизмов Модели. В случае неправильной работы дальнейшая эксплуатация Модели запрещена до выяснения причин неправильной работы механизмов Модели.
— Отойдите от Модели на безопасное расстояние.
Радиоуправляемые модели выполнены из различных материалов, в том числе из пластика. Пластик подвержен повреждению и деформации от перегрева и холода. Не храните модель рядом с любыми источниками тепла, такими как газовая плита или батарея отопления. Храните модель в проветриваемом помещении при комнатной температуре.
МЕРЫ ПРЕДОСТОРОЖНОСТИ ПРИ ИСПОЛЬЗОВАНИИ АККУМУЛЯТОРОВ
Для предотвращения пожара, пожалуйста, будьте аккуратны с аккумуляторами. Соблюдайте полярность и не допускайте короткого замыкания. Не деформируйте и не прокалывайте их. Зарядка аккумуляторов всегда должна производиться под присмотром в местах, не доступных для детей. Литий-полимерные аккумуляторы представляют более высокие эксплуатационные угрозы по сравнению с другими аккумуляторами. Поэтому, обязательно необходимо соблюдать инструкции по использованию. Изготовитель и дилер не несут ответственности за убытки, вызванные неправильным использованием аккумуляторов. Чтобы избежать возгорания и взрыва аккумуляторов, не используйте зарядные устройства, кроме поставляемого в комплекте. Аккумуляторы запрещается: деформировать, разбирать, нагревать, прокалывать, замыкать накоротко, хранить в одной емкости с металлическими предметами. Соблюдайте полярность. Зарядка аккумуляторов всегда должна производиться под присмотром, в местах, не доступных для детей.
Прекратите использование аккумулятора при его чрезмерном нагреве после эксплуатации или зарядки. Продолжение использования такого аккумулятора может привести к его вздутию, возгоранию и даже взрыву. Пожалуйста, утилизируйте отработавшие аккумуляторы согласно местным законам и постановлениям.
Технические характеристики квадрокоптера:
• Размеры: 350х350 мм
• Мотор: коллекторный — 4 шт
• Частота управления пульта: 2,4 ГГц
• Количество каналов управления: 4
• Гироскоп: 6-осевой
• Аккумулятор: 11.1v 2700 mah
• Зарядка: 90-120 минут
• Время полета: примерно 10 минут
• Дальность управления: до 300 метров
КОМПЛЕКТАЦИЯ КВАДРОКОПТЕРА С КАМЕРОЙ cheerson cx20
В комплектацию включается:
— модель квадрокоптера
— комплект крепления для GOPRO камеры
— ножки для модели квадрокоптера
— передатчик (пульт управления)
— аккумулятор 2700 mah
— зарядное устройство
— комплект лопастей
— отвертка и необходимые винты
— упаковка для безопасной транспортировки
— руководство по использованию (инструкция)

Органы управления на пульте:
— кнопка вкл/выкл находится между джойстиками
— левая верхняя кнопка — переключение между управлением профессионал/новичок
— левый джойстик вверх/вниз — газ
— левый джойстик влево/вправо — руддер (поворот относительно своей оси)
— под левым джойстиком — триммер руддера (настройка чувствительности)
— справа от левого джойстика — триммер — вверх снимок фото, вниз вкл/выкл видео записи
— правая верхняя кнопка — 3D перевороты. При нажатии появляются звуковые отрывистые сигналы. После нажатия наклоните правый джойстик в любую сторону для переворота.
— правый джойстик вверх/вниз — полет вперед/назад
— правый джойстик влево/вправо — полет вправо/влево
— под правым джойстиком — триммер по тангажу
— слева от левого джойстика — триммер по крену
ЗАПУСК КВАДРОКОПТЕРА НА ПУЛЬТЕ УПРАВЛЕНИЯ Cheerson cx20

Подготовка модели к запуску состоит из следующих этапов:
1. Зарядите бортовой аккумулятор от пульта управления от сети при помощи зарядного устройства (осуществляйте зарядку под присмотром, не более 90 минут).
2. Установите бортовой аккумулятор на модель.
3. Установите 4 батарейки АА типа в передатчик (пульт управления) — используйте только качественные алкалиновые батарейки или заряженные аккумуляторы АА типа (не используйте разные по емкости и производителю батарейки или аккумуляторы для пульта управления).
4. Убедитесь, что ручка газа (левый рычаг на пульте управления) находится в нижнем положении.
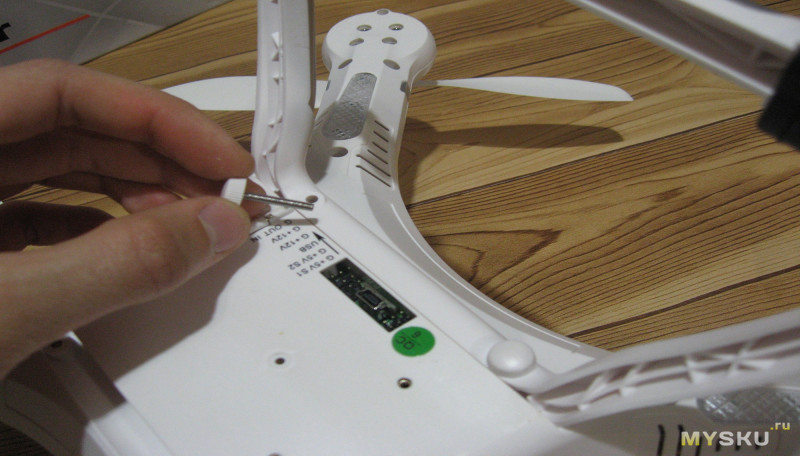
5. Включите питание квадрокоптера (у модели CX20 особенность — сначала включается сам квадрокоптер, а лишь потом только пульт). Для этого подключите провод аккумулятора к соответствующему разъему квадрокоптера (чтобы это сделать, сдвиньте крышку на нижней части квадрокоптера пальцем, чтобы открыть полость для аккумулятора). Поставьте квадрокоптер на ровную поверхность и отойдите на безопасное расстояние.
6. Включите пульт управления кнопкой включения питания, при этом левый рычаг газа должен находиться в нижнем положении. Дождитесь, пока квадрокоптер поймает спутники — правый задний индикатор должен стать зеленым.
7. Для запуска двигателей необходимо левый джойстик переместить в положение вниз-вправо.
8. Дождитесь готовности квадрокоптера (светодиоды горят постоянно). Полетное время на заряженном аккумуляторе — примерно 12 мин (в зависимости от интенсивности полета и состояния аккумулятора).
9. При разряде аккумулятора модель начинает сигнализировать светодиодными фонарями на корпусе квадрокоптера. В этом случае зарядить аккумулятор с помощью имеющегося в наборе зарядного устройства.
ВЫКЛЮЧЕНИЕ КВАДРОКОПТЕРА cheerson cx20
1. Отключите бортовой аккумулятор
2. Выключите передатчик (пульт управления)
3. Снимите бортовой аккумулятор (не заряжайте аккумулятор сразу после полета, дайте ему остыть после использования). При необходимости, подключите бортовой аккумулятор к зарядному устройству.

ИСПОЛЬЗОВАНИЕ ЗАРЯДНОГО УСТРОЙСТВА
Для заряда бортового аккумулятора Вы можете использовать зарядное устройство (ЗУ). Порядок использования:
1. ВАЖНО: отключите бортовой аккумулятор от квадрокоптера и извлеките сам аккумулятор из модели.
2. ВАЖНО: если аккумулятор горячий после использования, дождитесь пока он остынет, не заряжайте его сразу после полета!
3. Подключите бортовой аккумулятор к соответствующему разъему на ЗУ.
4. Подключите ЗУ к источнику питания (вставьте USB разъем в порт компьютера либо USB адаптера).
5. Индикация зарядки в данной модели следующая: Красная лампочка горит — означает процесс зарядки аккумулятора. Красная лампочка погасла — зарядка завершена.
ОБЩИЕ ПРИНЦИПЫ УПРАВЛЕНИЯ КВАДРОКОПТЕРОМ cheerson CX20
Прежде чем пилотировать квадрокоптер на пульте управления, пожалуйста, ознакомьтесь с ним, внимательно прочитайте инструкцию. Познакомьтесь со всеми видами управления и повторяйте их, пока не доведёте до автоматизма.

1. Установите квадрокоптер на просторную открытую площадку.
2. Учитесь работать ручкой газа (левый рычаг).
3. Осваивайте пилотирование:
• Газ больше/меньше (взлёт/посадка).
• Крен (наклоны) влево/вправо.
• Руддер (повороты) влево/вправо.
• Тангаж вперёд/назад.
4. Практика полётов очень важна, продолжайте тренироваться, пока движения пальцев не станут автоматическими.
РЕГУЛИРОВКА КАЖДОГО ТРИММЕРА ПУЛЬТА УПРАВЛЕНИЯ
Медленно поднимайте ручку газа до тех пор, пока квадрокоптер не оторвется от земли. Вы можете использовать триммеры для настройки, если Модель отклоняется в сторону.
1. Триммирование по рудеру.
Перед отрывом квадрокоптер уводит вправо. Вам нужно отриммировать влево.
Перед отрывом квадрокоптер уводит влево. Вам нужно отриммировать вправо.
2. Триммирование по тангажу.
Перед отрывом квадрокоптер уводит вперед. Вам нужно отриммировать назад.
Перед отрывом квадрокоптер уводит назад. Вам нужно отриммировать вперед.
3. Триммирование по крену.
Перед отрывом квадрокоптер крутит вправо. Вам нужно отриммировать влево.
Перед отрывом квадрокоптер крутит влево. Вам нужно отриммировать вправо.
ПОДКЛЮЧЕНИЕ FPV МОДУЛЯ ДЛЯ CX-20
видео по подключению FPV модуля к квадрокоптеру:
еще видео:
http://www.youtube.com/watch?v=JQRBQ_nhLrQ
еще видео крупнее:
И принцип подключения OSD модуля в видео ниже:

-
Bookmarks
Quick Links
Auto-Pathfinder
6 — Axis System
USER MANUAL
Related Manuals for Cheerson CX-20
Summary of Contents for Cheerson CX-20
-
Page 1
Auto-Pathfinder 6 — Axis System USER MANUAL… -
Page 2: Installation Instructions
1 of 7 Installation instructions 1 The Propellers Installation (1)To prepare the quadcopter and propellers (2)The propeller with spin-mark should be installed upward, and to make sure the spin-mark of propellers and its equipped motor rotate in the same direction. (3)To use the hexagon wrench in the kits to tighten the omament cap of the motor ( Note:For the black omament cap, to tighten the cap anticlockwise, for the silver cap, to tighten it clockwise ).
-
Page 3
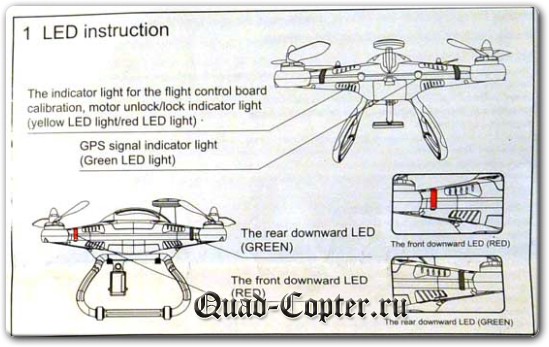
2 of 7 2 The instructions for the indicator lights and the status 1 LED instruction The indicator light for the main control board calibration, motor unlock/lock instructional light (YELLOW light/RED light) GPS signal instructional light (GREEN light) The rear downward LED The front downward LED (RED) (GREEN) The front downward LED… -
Page 4
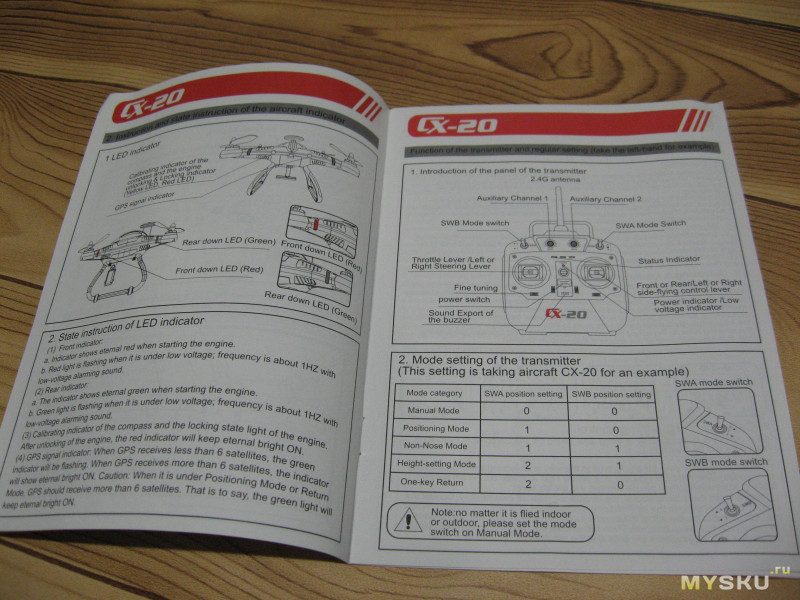
Forward/Backward Trimmer Left side/Right side flying stick Power ON/OFF Power indicator light Low voltage indicator light Buzzer speaker 2 Transmitter Mode setting. (the CX-20 the example) SWA Mode ON/OFF Mode type SWA Setting SWB Setting Manual Mode Stable Mode Flight Direction… -
Page 5: Basic Operation
4 of 7 4 Basic operation 1. Binding (1)To insert the battery into the quadcopter battery container and connect them. The Red indicator light and the Green indicator light will blink rapidly alternately, please do not move and shake the quadcopter at this moment; to close the battery cover when the Red indicator light and the Green indicator light blink slowly alternately.
-
Page 6
5 of 7 5 Mode Switched (1)Manual Mode: To set SWA on the “0” position, after the motors are unlocked, to push the throttle stick, then it can go forward/backward, go up/down, do left-side flying/right-side flying, turn left /right, etc. (2)Stable Mode: To take off the quadcopter and keep it in a certain height in Manual Mode, then to set SWA on the “1”… -
Page 7: Frequently Asked Questions And Solutions
6 of 7 Return Home when the quadcopter is out of control: When the quadcopter (6) is out of control, it’ll turn into the Return Home Mode and return back and land in the position when it is unlocked automatically. The cancellation of the Return Home Mode: In Return Home Mode and (7)…
-
Page 8
Deat customer: Thank you for purchasing a Cheerson radio control aircraft product.In order to quickly and safely master the operation of the “CX-20”, please read the user handbook carefully and then keep it in a safe place for futureconsultation and refernce.
Содержание
- 1 Описание
- 1.1 Quanum Nova
- 1.2 Особенности
- 2 Характеристики
- 3 Версии
- 4 В комплекте:
- 5 Потребуется:
- 6 Комплектующие
- 6.1 Полётный контроллер
- 6.1.1 Схема подключения контроллера APM к CX-20
- 6.2 Прочие комплектующие
- 6.1 Полётный контроллер
- 7 Режимы полёта
- 7.1 Ручной режим
- 7.2 Удержание позиции
- 7.3 Удержание высоты
- 7.4 Виртуальное направление
- 7.5 Возврат «домой»
- 8 Недостатки
- 9 Обзоры
- 10 Калибровка
- 10.1 Калибровка компаса
- 10.2 Калибровка гироскопов
- 11 Советы
- 11.1 После покупки
- 11.2 Настройка
- 11.2.1 Настройка FailSafe
- 11.3 Первый запуск
- 11.4 Полезное
- 12 Возможности APM
- 13 Тюнинг
- 14 FAQ
- 14.1 Что означают световые сигналы индикаторов
- 14.2 Не армится
- 14.3 «Пикает» пульт
- 14.4 Что будет если в полёте выключится пульт?
- 14.5 Какой порядок подключения моторов?
- 14.6 Что на DVD, идущем в комплекте?
- 15 Отзывы
- 16 Где купить
- 17 Ссылки
- 18 См. также
Описание [править]
Cheerson CX-20 — квадрокоптер 350-го размера с функциями GPS, такими как удержание позиции, возврат домой, полёт по маршруту. В магазине tinydeal.com продаётся также под названием CXHobby CX-20 (вероятно, первоначальное название, если этот сайт принять за сайт производителя).


Quanum Nova [править]
В Хоббикинге продаётся под названием Quanum Nova. Причём, от Cheerson CX-20 есть отличия не только в надписях, актуально для первых моделей 2014 года выпуска и начала 2015. Немного доработана конструкция коптера: на нижнюю грань корпуса выведен USB-порт и можно подключать полётный контроллер к компьютеру для обновления ПО, настройки или установки полётного задания по точкам — не вскрывая корпуса.С середины 2015 года, все коптеры не имеют отличий кроме названия, можно брать любой….
Особенности [править]
Имеет внешний съёмный крепёж с виброразвязкой для лёгкой камеры типа GoPro.
IOC (Intelligent Orientation Control) – интеллектуальный контроль ориентации MX-автопилота определяет направление «вперёд» следующим образом: в режиме «course lock flying» направление вперёд совпадет с направлением носа коптера, в режиме «home lock flying» направление вперед – от текущего положения к точке взлета.
Когда пропадает радиосвязь между контроллером и передатчиком, выходные сигналы с контроллера становятся в соответствии со средним положениям стиков. Если при этом GPS-сигнал достаточно сильный, то автоматически запустится возврат домой.
Характеристики [править]
- Размер: 365 мм
- Размер моторов: 2212 (возможно, те же, что стоят в первых версиях DJI Phantom) — по классификации производителя размер 2824. Также известно о двух модификациях: 920KV или 1200KV.
- Регуляторы имеют обозначение CX-20-005 (с красными светодиодами) и CX-20-006 (с зелеными светодиодами). Судя по допустимому току ключей (42 ампера) и проводов (20AWG, 12 ампер), регулятор рассчитан на 12 ампер. Калибровка описана в видео.
- Пропеллеры: 8″ (типоразмер 8045). Диаметр лопастей: 205 мм
- Габаритные размеры: 300 x 300 x 200 мм
- Взлётный вес: 875 г (с штатным аккумулятором весом 198 г)
- Время полёта: 15 минут (10 минут с 300 г полезной нагрузки) с штатным аккумулятором.
- Горизонтальная скорость полёта: 10 м/с максимум
- Вертикальная скорость 6 м/с максимум
- LiPo-аккумулятор: Fullymax 3S 2700mAh 20С/40С
- Радиоуправление: 7-канальное
- Полётный контроллер: см. ниже
Версии [править]
- Open Source (открытая версия)
- Принципиальное отличие: полётный контроллер представляет собой APM с возможностью использовать всю мощь ArduPilot и ПО MissionPlanner. См. подробнее.
- Внешнее отличие, было на ранних моделях 2014 года: USB-разъём только в полётном контроллере. Чтобы к нему подключиться, нужно разбирать корпус. (Quanum Nova c Хоббикинга, являясь OpenSource-версией, тем не менее поставляется с USB-удлинителем и USB-разъёмом, вынесенным на корпус коптера,теперь и все версии CX-20 не только NOVA). GPS-модуль установлен рядом с полётным контроллером на распредплате. В корпусной «антенне» над основным корпусом коптера размещён только компас (можно открыть и посмотреть).
- ZERO-версия
- Принципиальное отличие: полётный контроллер (по разным данным — производства либо компании GlobalFly, либо Zero Tech, что маловероятно) — основан на 32-разрядном чипе AMR STM32F103 RBT6, который пока никому не удалось подключить к MissionPlanner, соответственно возможности этой версии являются сильно урезанными. См. подробнее.
- Внешнее отличие: GPS-модуль размещён с компасом в корпусной «антенне» (можно открыть и посмотреть). USB-удлинитель с разъёмом прямо в корпусе коптера, таким образом для подключения полётного контроллера к компьютеру не требуется разборка коптера.
- Big Fly Shark — редкий случай, полётный контроллер (производства компании GlobalFly) на основе STM32F103, программное обеспечение на сайте bigflyshark.com.
В настоящее время в продаже можно встретить любую из этих версий.
Наглядный список различий:
В комплекте: [править]
- Квадрокоптер Cheerson CX-20 (или Quanum Nova, или CXHobby CX-20) с неустановленными ножками-шасси.
- 7-канальный передатчик 2.4 ГГц (mode 1 — газ справа, mode 2 — газ слева)
- LiPo-аккумулятор (есть комплектации без него)
- Зарядно-балансирное устройство для LiPo-аккумулятора (100~240V, американская вилка)
- Крепление для GoPro Hero 3 с виброразвязкой
- 4 пропеллера 8″ (совместимы с пропеллерами DJI для Phantom). Возможна установка пропеллеров до 10″ (расстояние между пропеллерами при размере 10″ будет около 1 мм).
- Инструкция, CD-диск, отвёртка и ключ для установки винтов.
Потребуется: [править]
- 4 x батарейки AA для передатчика
- LiPo-аккумулятор 3S 2700mAh (есть комплектация с аккумулятором)
Комплектующие [править]
-

-

-
Общий вид Quanum Nova



Полётный контроллер [править]
Полётный контроллер представляет собой бутерброд из двух плат. На верхней расположены датчики: Invensense MPU-6000 (акселерометр и гироскоп в одном корпусе) и барометр Meas-spec MS5611 (для измерения высоты и удержания CX-20 на этой высоте). На нижней плате — микроконтроллеры ATmega2560 (основной контроллер) и ATmega32U2 (отвечает за USB-интерфейс, PPM-энкодер), EEPROM-память AT28C256 и TXB0104 (согласователь логических уровней между датчиками, которые питаются от 3.3 Вольт и контроллером, которому нужно 5 В).
-
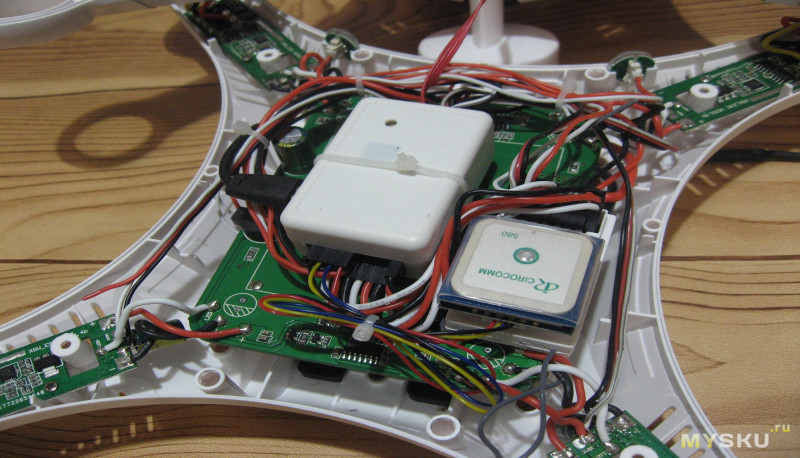
Полётный контроллер, GPS-модуль, приёмник — виброизолированы

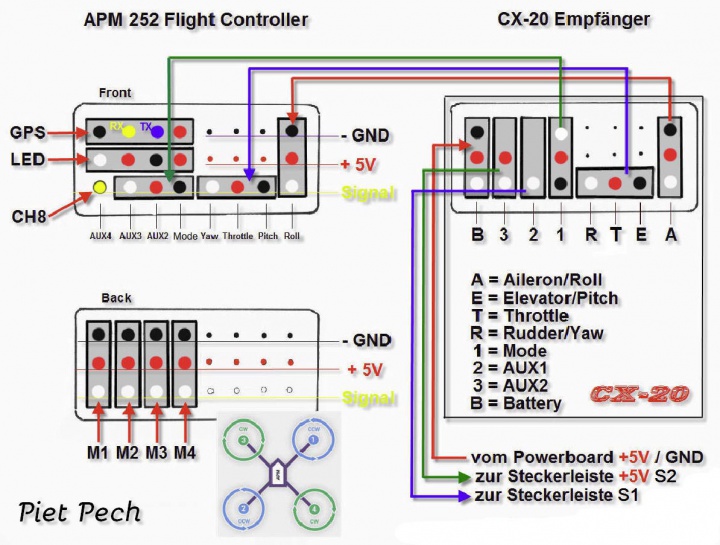
Схема подключения контроллера APM к CX-20 [править]
Прочие комплектующие [править]
-
-
Регулятор оборотов со стороны светодиодов БАНО
-

Мотор
-
На нижней стороне мотора надпись Constar — название производителя
-
-

Плата приёмника
-
-
Понижающий преобразователь MP1593 на распредплате.
-
Внутри пульта радиоуправления
-
Плата штатного зарядного устройства
-
Штатное крепление камеры типа GoPro











Режимы полёта [править]
| SWB | SWA | |
|---|---|---|
| Ручной режим | 0 | 0 |
| Удержание позиции | 0 | 1 |
| Удержание направления | 1 | 1 |
| Удержание высоты | 1 | 2 |
| Возврат в точку взлета | 0 | 2 |
Ручной режим [править]
Он же полуавтоматический, он же Stabilize Mode, он же Take-Off Mode (т.к. рекомендуется к использованию при взлёте и посадке). Управление весьма резкое для новичка.
Для стабилизации CX-20 в этом режиме используется только датчик Invensense MPU-6000 (акселерометр и гироскоп в одном корпусе) и барометр Meas-spec MS5611 (для измерения высоты и удержания CX-20 на этой самой высоте), а также магнитометр HMC5883L.
Удержание позиции [править]
GPS Mode — в работу включается GPS-модуль и CX-20 старается удерживать позицию с отклонением не более +/-0.5 м. На движение стиков CX-20 реагирует с запозданием, а углы крена и тангажа ограничены 15-20°, из-за чего значительно снижается скорость полета.
Не рекомендуется для городских полетов! Отражённые от зданий сигналы GPS-спутников могут внести большую погрешность в определении позиции и заставить коптер полететь в неожиданном направлении.
Удержание высоты [править]
Altitude Hold Mode. Этот режим можно включать после взлёта в ручном режиме до некоторой высоты. Когда стик газа в центре — CX-20 держит высоту самостоятельно, при этом за пилотом остается возможность контролировать набор высоты или снижение соответствующим движением стика газа, а также перемещать коптер в стороны на зафиксированной высоте, а также вращать его. Этот режим можно использовать для обучения полёту в ручном режиме (на каком-то этапе обучения следует отказаться от режима удержания высоты), а также просто для комфортного полёта, например, FPV.
Виртуальное направление [править]
Orientation Mode. В каком положении будет включен этот режим — там и будет у CX-20 виртуальный «нос», неважно как будет повёрнут коптер. При выключении Orientation Mode лучше оказаться позади квадрокоптера, иначе управление инвертируется.
Такой режим может упростить управление CX-20 для новичков, если включить его носом «от себя»: можно летать не заботясь о направлении коптера: движение правого стика (mode 2) «от себя» будет в любом случае означать движение коптера «от себя» и т.д. В некоторых случаях такой режим может быть полезным, но в целом это бесполезная и даже вредная практика, т.к. при нештатных ситуациях лучше обладать навыками управления полностью ручного управления
Возврат «домой» [править]
Return Home Mode. CX-20 сам поднимется (или опустится) на высоту 20 метров и вернётся в точку взлёта (там, где включалось питание), ожидая дальнейших действий со стороны пилота. Для отмены RTH необходимо перевести переключатель SWA в позицию «0», затем в «1» и снова в «0». Важно после включения коптера дождаться постоянного свечения зеленого светодиода (что сигнализирует об обнаружении необходимого количества спутников GPS), иначе при задействовании режима Return Home Mode коптер CX-20 может улететь в неопределённую точку.
Недостатки [править]

![]()
Уязвимые для перелома места у ножек
- Слабые ножки. Если опыта пилотирования мало, рекомендуется приобрести запасные. Если аккуратно приземляться, тогда — нормальные.
- Пластик тонкий, даже лёгких падений может не выдержать.
- Маленький отсек для аккумулятора: 120х45х27 мм. Если убрать резиновый уплотнитель и срезать кончики винтов крепления подвеса, которые торчат прямо в аккумуляторный отсек, то высоту можно увеличить на 3 мм и тогда размеры будут 120х45х30 мм. Распредплату, которая по совместительству является одной из стенок отсека, можно поставить на проставки 5 мм, соответственно увеличится размер отсека по высоте, но загрузке больших аккумуляторов будет мешать узкий проём дверки, придётся спиливать.
- Также, благодаря непрямоугольной форме отсека возможно установить аккумулятор размерами до 120х50х17 мм.
- Крышка отсека аккумулятора должна быть снабжена уплотнителем, прижимающим аккумулятор внутри отсека, и не дающим ему болтаться внутри. Но часто её почему-то нет в комплекте.
- Сложная (нестабильная) процедура арминга (разблокировки двигателей): делаешь всё по инструкции, но не всегда срабатывает. Отмечают многие пользователи. Подробнее смотрите в FAQ.
- Штатная «игрушечное» зарядное устройство заряжает штатный же аккумулятор около 3 часов и, по мнению многих пользователей, быстро приводит его в негодность. Лучше заменить штатную зарядку на более серъёзное зарядно-балансировочное устройство, например IMAX B6.
- В CX-20 предусмотрена двухуровневая защита при низком напряжении батареи. На первом этапе мигает светодиод и издаётся звук «би-би-би», чтобы предупредить о том, что аккумуляторы заканчиваются. На втором этапе система должна запускать автопилот для автоматического приземления. На деле же (когда напряжение на аккумуляторе упадёт до 10В, или по ~3.3В на банку) моторы остановятся и CX-20 упадёт. То есть защиты по питанию на самом деле нет, и это неудивительно, если знать, что мониторингом напряжения на аккумуляторе занимается отдельный микроконтроллер STM8S003F3, не связанный с полётным контроллером, а управляющий напрямую зуммером (пищалкой) и БАНО. Но защиту от переразряда аккумуляторов можно сделать самому, спаяв делитель на двух резисторах с аккумулятора на вход микроконтроллера.
Обзоры [править]
- Видео: Калибровка и быстрый старт (рус.)
- Обзор от пользователя на mysku.ru
- Обзор на quadrocoptery.ru
- Видео-обзор от пользователя (англ.)
- Видео: Подключение подвеса (англ.)
- Сайт CX-20.ru с большим количеством материалов по этому квадрокоптеру.
Калибровка [править]
Калибровка компаса [править]
Обязательно выполнять при первом полёте и каждый раз при полёте не в том месте, где был полёт в прошлый раз.
- Вставить аккумулятор и соединить разъёмы.
- Включить пульт управления и в течение 5 секунд перевести правый стик (если пульт mode 2) в нижнее правое положение. По истечении 5 секунд режим калибровки перестанет быть доступным и придётся вернуться к первому пункту.
- Левый индикатор должен начать попеременно мигать красным и жёлтым цветом. Свечение правого светодиода безразлично.
- Расположить квадрокоптер в руках «носом от себя» и повернуться вокруг своей оси по часовой стрелке 3-5 оборотов, желтый светодиод начнет медленно мигать, затем опустить нос коптера и совершить еще 3-5 оборотов по часовой стрелке, красный и зеленый светодиоды начнут мигать вместе.
- Опустить квадрокоптер на землю и отключить питание, не обращая внимания на продолжающие мигать светодиод. Все настройки сохранятся автоматически.
Также желательно проверить (осторожно — винты!) в Mission Planner под нагрузкой на правильность/стабильность показаний. Задача — чтобы в Mission Planner север и другие стороны света совпадали с фактическими. Правильней калибровать именно под нагрузкой (с запуском моторов). Старайтесь минимизировать влияние магнитных помех (проводите калибровку вдали от электросетей, зданий, автомобилей и любых других устройств, генерирующих магнитные поля).
Калибровка гироскопов [править]
Следует выполнить калибровку гироскопов если коптер в ручном режиме полёта сносит даже при отсутствии ветра
- Включить коптер
- Левый стик перевести в положение «вправо и вниз»
- Удерживать стик в этом положении в течении 15-20 секунд пока оба индикатора не начнут мигать (левый желтым и красным попеременно, правый зеленым).
- Взлететь и в течение примерно 20-30 секунд удерживать квадрокоптер в одной точке.
- Посадить квадрокоптер и отключить питание.
- Гироскопы откалиброваны и можно летать.
Советы [править]
После покупки [править]
То есть перед первым полётом или после пробных полётов (чтобы убедиться в работоспособности аппарата), но перед регулярным использованием.
- Разобрать корпус, зафиксировать термоклеем электролитические конденсаторы на регуляторах и на плате.
- Проверить разъемы, подергать провода.
- Посадить на локтайт винты крепления двигателей. Либо перед каждым взлётом проверять и подтягивать крепление.
- Установить Mission Planner. Всему, что будет предложено при первом подключении (перепрошить/мастер настройки) — отказать.
- Проверить срабатывание RTL при отлючении пульта (в Mission Planner).
- Включить без винтов, проверить реакцию на наклоны и на стики.
- Поставить винты, проверить правильность установки. Ещё раз проверить реакцию на наклоны и на стики.
Настройка [править]
На случай, если после изменения настроек коптер будет вести себя неадекватно по непонятной причине, существуют файлы с сохранёнными настройками по умолчанию. Оригинальные настройки Quanum Nova для загрузки в Mission Planner.
Ещё (Cheerson CX-20 RTF, ArduCopter V3.1.2, куплен 20.06.2015 на banggood.com)
Настройка FailSafe [править]
Первым делом сохраните настройки, на всякий случай.
- FS_THR_ENABLE=1 — Включить возврат домой при пропадании связи
- FS_GPS_ENABLE=1 — Включить автоматическую посадку при пропадании спутников.
- Установить высоту возврата (RTL_ALT в сантиметрах) — не ниже максимальной высоты (относительно точки взлета) зданий/деревьев, которые могут встретиться. Проверить, чтобы ALT_HOLD_RTL была 0 или не ниже RTL_ALT.
- Проверить высоту (RTL_ALT_FINAL) конечной точки возврата (чтобы коптер правильно приземлился, должно быть = 0)
- Установить время (RTL_LOIT_TIME), необходимое для распугивания любопытных перед посадкой (в миллисекундах).
- Установить максимальный угол ANGLE_MAX (рекомендуется 35°). Больше — может при полёте потерять высоту, меньше — может не справиться с ветром (проверено).
- Установить FS_THR_VALUE. Должно быть выше выше значения газа при выключенном пульте и ниже минимального значения газа при включенном пульте.
- Установить скорость возврата (700см/с) (WPNAV_LOIT_SPEED, см/с).
- Установить скорость снижения (400см/с) и посадки (50см/с) (WPNAV_SPEED_DN, LAND_SPEED)
- Проверить GPS_HDOP_GOOD=200, GPSGLITCH_ENABLE=1, GPSGLITCH_ACCEL=1000, GPSGLITCH_RADIUS=200
Если случилась потеря связи с передатчиком, то во время возврата коптера «домой» она, вероятно, может восстановиться и можно перехватить управление коптером вновь. Для этого нужно перевести переключатель SWA в позицию «0», затем в «1» и снова в «0». После этого коптер снова станет управляемым в ручном режиме.
ВНИМАНИЕ! Процедура перехвата не сработает если пульт управления был отключен и снова включен. В этом случае управление восстановится только после отключения и включения питание на коптера. Таким образом, при срабатывании FailSafe ни в коем случае не выключайте пульт!
ВНИМАНИЕ! Убедитесь в том, что перед перехватом управления стик газа находится в средней позиции или чуть выше! Если газ будет в нижней позиции — коптер упадет!
Первый запуск [править]
- Вставить полностью заряженный аккумулятор.
- Найти безопасное свободное место, где нет зевак и препятствий.
- Включить (подключить аккумулятор к разъёму).
- Выполнить калибровку компаса — гарантия того, что Cheerson CX-20 не улетит неведомо куда.
- Дождаться обнаружения GPS-спутников (ждать, пока правый зелёный светодиод не перестанет мигать и загорится постоянно). После замены аккумулятора спутники определяются за считанные секунды — это называется «горячий старт».
- Включить пульт (передатчик). Все тумблеры должны быть в верхнем положении, а ручка газа — в нижнем.
- После установки соединения передатчика с приёмником квадрокоптера (прозвучит мелодия) нужно разблокировать моторы, для чего перевести стик газа (в Mode 2 — левый) в правое нижнее положение. Квадрокоптер попеременно мигнет своими индикаторами. Как только оба светодиода перестанут мигать — можно взлетать!
- Взлететь в режиме Stabilize. Оттриммировать при необходимости. Можно использовать функцию Auto-Trim (если после арминга не отпускать левый стик до желтого мигания левого светодиода, потом взлететь и стараться ровно висеть секунд 20, пока диод не загорится красным).
- Проверить как себя ведёт коптер. При необходимости (сильно тащит в сторону/пытается опрокинуться) — ещё раз откалибровать гироскопы/акселерометры.
- Переключить в режим Althold (стик газа должен быть при этом в середине). Осторожно, может управляться не так и лететь не туда, куда задумано. Надо будет потом отключить Simple Mode. Проверить.
- Переключить на loiter (стик газа в середине). Проверить как висит. Если унитазит — калибровать компас. Если пытается улететь — переключить в Althold/Stabilize (стик газа в середине!), посадить, искать причины (нет спутников, сдох GPS, забыли выйти на улицу, рядом работающая РЛС, отвалился провод, и т.п.)
- Проверить RTL.
- После посадки перевести стик газа в нижнее левое положение и дождаться пока красный индикатор не станет мигать — теперь двигатели не запустятся и можно отключать аккумулятор.
Полезное [править]

![]()
Расположение антенн для лучшего приёма
- Закрепить штатные антенны приёмника радиоуправления нештатным образом: под дном — одну вдоль, другую поперек (антенна на передатчике должна быть расположена параллельно земле, вбок). Это должно увеличить максимальную дальность радиоуправления. При любом положении квадрокоптера относительно пульта какая-либо из них будет ориентирована к пульту перпендикулярно (или близко к этому), обеспечивая максимальный приём сигнала. На практике дальность увеличивается в ~2 раза [1]
- Заказать дополнительный аккумулятор (или несколько) и нормальное зарядное устройство.
- Заказать запасные ноги, винты.
- Установить трекер/маячок для возможности быстро найти коптер в случае его неконтролируемого улёта.
- Желательно научиться летать в режиме Stabilize. См. также Ручное управление.
Ошибка создания миниатюры: По видимому, отсутствует файл /var/www/aerofotovideo/data/www/multicopterwiki.ru/images/d/d0/Провода-CX-20.jpg
![]()
Схема разводки проводов Cheerson CX-20
- Схема разводки проводов Cheerson CX-20
- CX-20/Nova предупреждает о разряде аккумулятора миганием и писком. Если не успеть посадить коптер, то после сильной просадки напряжения он просто упадёт. К сожалению, есть только звуковая и световая индикация.
Возможности APM [править]

![]()
FlightTool — приложение для настройки ZERO-версии Cheerson CX-20

![]()
Подключение телеметрии и OSD
Так как полётный контроллер является ни чем иным как ArduPilot Mega, то После обновления прошивки на APM становятся доступны все богатые возможности этого контроллера при подключении его через USB к компьютеру с установленной на ней программой MissionPlanner, например, полёт по точкам. Смотрите по аналогии использование контроллера DEVO-M — практически всё актуально и для Cheerson CX-20.
Примечание 1: Quanum Nova с Хоббикинга без проблем определяется в МissionРlanner как ArduCopter V3.1.2.
Примечание 2: После обновления прошивки на APM также возможно подключение телеметрии и OSD. При этом штатный порт телеметрии перестает работать, но есть решение — припаяться к резисторам у контроллера (обсуждения на RCDesign и RCGroups).
-
Вынужденная подпайка к резисторам вместо использования порта телеметрии.
-
Расположение места подпайки на плате.


Примечание 3: ZERO-версия Cheerson CX-20 поставляется с другим полётным контроллером на другом чипе AMR STM32F103 RBT6, который нельзя подключить к MissionPlanner. Вместо этого существует ПО для настройки источник (включая обновлённую прошивку) для настройки ZERO-версии, но с возможностями несравнимо меньшими, чем у OpenSource-версии: доступно всего несколько параметров, большинство из которых относится к PID-регулированию.
См. также: Настройка APM-контроллера
Тюнинг [править]
- Защита пропеллеров — будет полезна при полётах рядом с препятствиями или на случай переворота коптера при взлёте или посадке. Где купить

![]()
Широко стоящие ножки
- Для упрощения посадки CX-20 (как в ручном, так и в автоматическом режиме) на неровную поверхность следует увеличить расстояние между крайними точками посадочных опор. Это можно сделать из подручных материалов или скачать модель ножек и распечатать на 3D принтере, прикрепить их можно пластиковыми стяжками или «кольцом-липучкой».

![]()
Шасси для случая установки бесколлекторного подвеса
- Шасси для полетов с подвесом для экшн-камеры. Штатное коротковато и камера в большинстве вариантов подвесов цепляется за землю. Кроме этого, ноги штатного шасси попадают в кадр. В этом варианте обе проблемы решены (модель для печати на 3D-принтере).
FAQ [править]
Что означают световые сигналы индикаторов [править]
Снизу и сверху лучей квадрокоптера расположены бортовые навигационные огни. Передние огни — красные, задние — зелёные. В ярких солнечный день их почти не видно. Если в полете эти индикаторы мигают и раздаются звуковые сигналы — значит аккумулятор почти разрядился и пора заходить на посадку.
Если смотреть на квадрокоптер сзади, то левый индикатор может мигать красным или жёлтым, а правый — зелёным.
- Левый
- мигает красным когда двигатели квадрокоптера не активны (не заармен): при движении стика газа коптер не начнёт вращать винтами
- горит красным когда коптер заармен.
- жёлто-красное мигание означает переход квадрокоптера в режим калибровки.
- Правый — отвечает за GPS
- мигает зеленым когда спутники не найдены или их недостаточно (менее 6) для автоматических режимов полета.
Не армится [править]
То есть — не разблокируются моторы: взлёт невозможен. Возможные причины:
- Механическая — неидеальная установка потенциометра в механизме стика, когда стик уже достигает своего крайнего нижнего положения, но контроллер пульта считывает не минимальное значение с потенциометра.
- Электронная — электроника пульта допускает дрейф значений того же потенциометра.
В обоих случаях, по идее, должна помочь либо калибровка стиков пульта через Mission Planner, либо подстройка триммерами на пульте.
- Неправильный выбор режима. Нужно убедиться, что контроллер находится в режиме Stabilize. Если он в режиме Loiter или другом, зависящем от GPS, квадрокоптер не будет армиться, пока не будет поймано достаточно спутников и HDOP не станет меньше 2 (светодиод при этом может гореть, показывая что связь со спутниками есть, но если HDOP > 2 все равно армиться не будет). Например, в режиме Loiter в квартире заармить не получится.Так же не получится заармить при HDOP менее 2х при включенной «стене» Geofence, сделано для подстраховки пилота,так как в случае потери ориентации по спутникам, стена не спасет от улета. Документировано тут.
«Пикает» пульт [править]
Даже если батарейки в пульте новые, или аккумуляторы полностью заряжены, пульт действительно может тревожно попискивать. На самом деле он прерывисто пищит, сообщая о том, что стик газа находится приблизительно в средней позиции (50% газа), что удобно при управлении в полуавтоматических режимах или при значительном удалении для удержания постоянной высоты полёта — не нужно смотреть на стик газа, чтобы понять его положение.
Что будет если в полёте выключится пульт? [править]
Коптер должен самостоятельно перейти в режим «возврат домой». Обязательно дожидайтесь определения координат до взлёта (постоянное свечение правого зелёного светодиода), иначе возможен улёт неизвестно куда.
Какой порядок подключения моторов? [править]
М1 — передний правый
М2 — задний левый
М3 — передний левый
М4 — задний правый
Что на DVD, идущем в комплекте? [править]
Два видеоролика — реклама и видеоинструкция. Больше там ничего нет.
Отзывы [править]
- Плюсы. … Индикацию видно со всех сторон. … Можно пилить прошивку под себя. Очень много настроек. Минусы. … Сложно подключать телеметрию/ОСД, на ранних версиях не распаян разъем, на поздних с середины 2015 под телеметрию есть разъем но со своей не стандартной распиновкой! (во первых — надо паять самому, во вторых почему-то сделали телеметрию на неправильный порт — после перепрошивки не работает и откатиться никак. Есть решение, но довольно замороченное — подпаяться прямо к процессору, исправлено в кастомных версиях прошивок и ничего паять не надо!). Посредственное радио. Автопосадка не очень — может козлить и опрокинуться. При этом может отломиться башня с компасом. Неудобно перехватывать управление при FS или миссии. Прочее. Большой батарейный отсек — но использовать сложно — нестандартный размер. [2]
Где купить [править]
- banggood.com/
- В Хоббикинге/Паркфлаере — OpenSource-версия под названием Quanum Nova:
- RTF c аккумулятором и зарядкой mode 2 mode 1
- RTF без аккумулятора и зарядки mode 2 mode 1
- Cheerson CX-20:
- Интернет-магазин Турбопульт, доставка по всей России — Cheerson CX-20
- В banggood.com ZERO-версия или OpenSource-версия Cheerson CX-20 RTF
- В gearbest.com OpenSource-версия.
- В tinydeal.com OpenSource-версия под названием CXHobby CX-20.
- В aliexpress.com………….. (неизвестно какие версии).
- Полётный контроллер:
- В banggood.com OpenSource-контроллер (APM-совместимый)
Ссылки [править]
- PDF Инструкция для Cheerson CX-20 на русском языке (турбопульт.ру)
- Инструкция на русском языке
- Краткая инструкция для Cheerson CX-20 (англ.)
- Обсуждение на RCDesign Ещё
- Обсуждение на RCGroups (англ.)
- FAQ на RCGroups (англ.)
- Сайт производителя (?)
См. также [править]
- Настройка APM-контроллера
- Краткое сравнение аппаратов Wltoys V303, Quanum Nova, Blade 350 QX2
- Краткий FAQ по первому вылету CX20/Nova. Минимально необходимые настройки в МР.
Другие квадрокоптеры 350-го размера
Здравствуйте, в этот раз рассмотрим легендарного квадрокоптера Cheerson CX-20
который отлично себя зарекомендовал своими полетными режимами, и относительно небольшой ценой.
Квадрокоптер собран на контроллере — ArduPilot Mega 2.5.2
БК моторы — 2212 980kV.
GPS модуль — BN-880
Имеем вот такую болбшую коробку с ручкой пластиковой ручкой, естественно данная коробка была запакована в почтовую коробку.
Комплектация:
-квадрокоптер;
-пропеллеры — 4шт.; (запасных нет)
-пульт управления квадрокоптером;
-ножки квадрокоптера — 2шт.;
-кронштейн для крепления камеры;
-зарядное устройство;
-аккумулятор 2700mA 3s 25c;
-инструкция по сборке и настройке квадрокоптера;
-ключ для съема пропеллеров;
универсальная отвертка с насадками, плоска — крестообразна и шестигранник 1.5-2.0мм.
Характеристики квадрокоптера:
-размер 300х300х220мм.
-полетный вес — 850грамм (без камеры);
-время полета на родном аккумуляторе около 13-15мин.;
-дальность радиосвязи пульта с квадрокоптером — 450м.
Полетные режимы квадрокоптера
Удержание позиции (GPS Mode)
В работу включается GPS-модуль. Почти такой же как у вас в телефоне, только с большой керамической антенной. В GPS Mode квадрокоптер старается удерживать позицию. Режим ужасно скучный, так как на движение стиков аппарат реагирует с запозданием, а углы крена и тангажа ограничены 15-20 градусами из-за чего значительно снижается скорость полета.
Удержание направления (Orientation Mode)
Новички часто сталкиваются с проблемой зеркального управления квадрокоптером, когда тот направлен носом в сторону пилота. Отчасти эта проблема решается установкой FPV-системы или включением режима удержания направления (в реальности же лучше освоить зеркальное управление — пригодится в экстренных ситуациях). В каком положении вы включите этот режим там и будет у квадрокоптера нос и если вы даете команду лететь вперёд по горизонтали, то он улетит от вас даже если повернут носом к вам. Главное при выключении Orientation Mode оказаться позади квадрокоптера иначе управление инвертируется.
Удержание высоты (Altitude Hold Mode)
Взлетаем в ручном режиме до высоты на которой хотим продолжить полет и включаем Altitude Hold Mode. Когда ручка газа в центре — аппарат держит высоту самостоятельно, при этом за пилотом остается возможность контролировать набор высоты или снижение. Аппарат достаточно резвый и летать в целом приятно. Именно в этом режиме у меня лучше всего получается крутить горизонтальную восьмерку. 
Возврат «домой» (Return Home Mode)
Если аппарат улетел слишком далеко, а вы летаете без FPV или просто лень вручную возвращать аппарат домой предусмотрен Return Home Mode. Квадрокоптер сам поднимется (или опустится) на высоту 20 метров и вернется в точку старта ожидая дальнейших действий со стороны пилота. Для отмены RTH необходимо перевести переключатель SWA в позицию «0», затем в «1» и снова в «0». ВАЖНО еще в процессе подготовки к полету дождаться постоянного свечения зеленого светодиода (сигнализирует о подключении к спутникам GPS), иначе квадрокоптер реально может в сторону Китая улететь.

Открываем коробку и видим еще коробочки с комплектующим.
Все таки производитель не сэкономил на бумаге.
В пакете получаем книжечку User manual, ключ для съема пропеллера и универсальную отвертку с насадками, плоска — крестообразна и шестигранник 1.5-2.0мм.
В инструкции можно увидеть, сборку квадрокоптера, калибровку компаса (мы это позже рассмотрим), назначение стиков и кнопок управления, функционал квадрокоптера.

В комплекте получаем зарядное устройство которым обычно комплектуют разные RC игрушки, то есть, зарядка простая с дешевых.
Li-Po аккумулятор mA2700 3S 25C имеющий знаменитый и ходовой штекер ХТ-60 что меня уже радует.

Пульт управления достаточно удобный своим размером.

На пульте имеются тумблерки переключения полетных режимов квадрокоптера к тому же возле тумблерком имеются написаные подскаски переключения режима.

Управления полетными режимами происходит от переключения именно етих тумблеров в такие положения:
0-0 ручной режим;
0-1 удержание позиции GPS;
0-2 возврат квадрокоптера в точку взлета;
1-1 хеад-лес режим;
1-2 удержание высоты.

На панели размещены две ручки которые можно задействовать для управления стабилизированным подвесом, которым можно купить отдельно.

Ну и собственно всеми знакомые триммера полета модели.

Пульт управления питается четырьма батарейками типа АА 1.5V.
Замечу что пульт изготовлен вполне качественно и с удобствами для управления моделью.

В комплекте получаем комплект пропеллеров на восьми дюймовых, вот только запасного комплекта нет, так что летаем аккуратно или же на перед заказываем еще комплект, я вот имею комплект пропеллеров от квадрокоптера Phantom 2 конечно они на дюйм больше но подходят по резьбе на вал мотора.
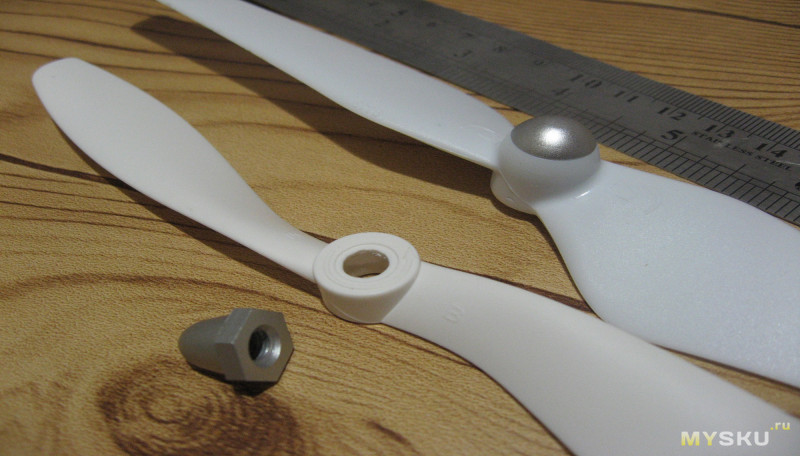
Пропеллер фиксируется на моторе гайкой, замечу что моторы с правым и левым вращением, в итоге получаем и гайки 2шт с правой резьбой М6 и 2шт с левой резьбой М6

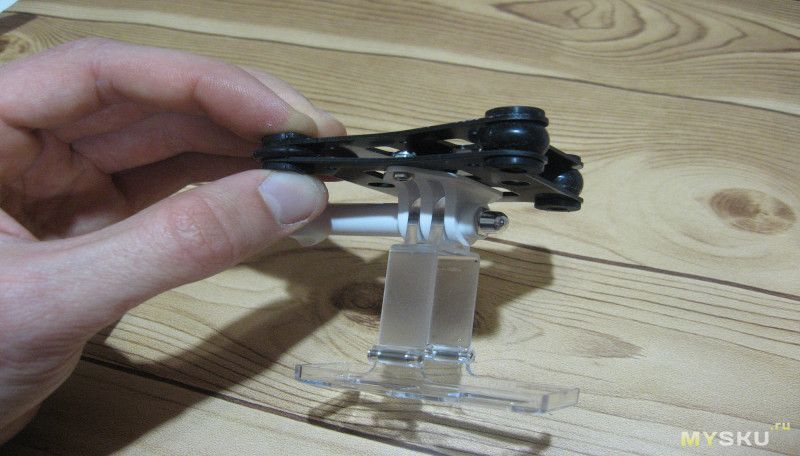
В комплекте получаем кронштейн с виброразвязкой для крепежа камеры.

Конечно производитель заточил кронштейн, а вернее посадочное место под камеру Gopro или же ее аналоги, в моем случае камера FIREFLY 6S.
Размер под камеру

Шасси квадрокоптера достаточно прочные крепятся болтиками с пластиковой барашкой для удобства и быстроты съема при транспортировке.

Собственно сам квадрокоптер в несобранном виде только из коробки.

Для правильной установки пропеллеров, нанесены стрелки вращения на лучах квадрокоптера и на пропеллерах.
После установки винтов нужно обязательно «протянуть» гайки ключом идущим в комплекте, иначе можете лишится одного из пропеллеров прямо в полете.

А вот цифровой компас (HMC5883L) вынесен на отдельную площадку, так называемую корпусную «антенну» дабы избежать наводок от силовых цепей.

Под лучами квадрокоптера расположена светодиодная подсветка которую в работе мы увидим после полной сборки модели.
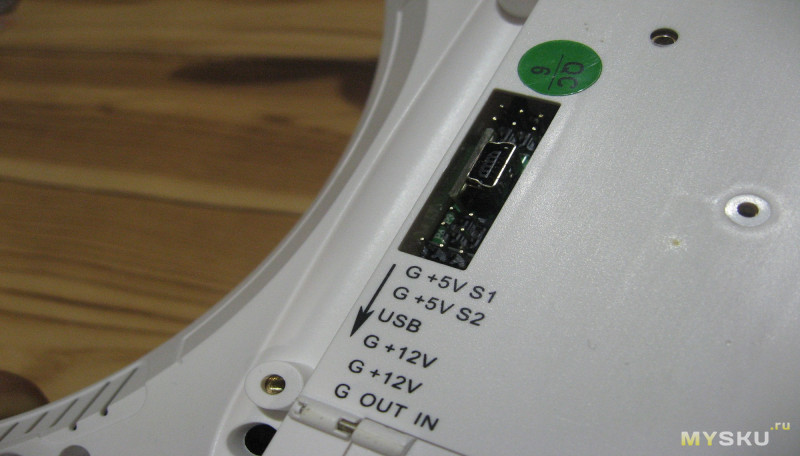
На брюхе квадрокоптера выведен с полетного контроллера Mini USB. разъем для подключения к ПК в программе Mission Planner представляет из себя карту, на которой можно посмотреть передвижение мультикоптера или задать точки для автономного полета. Слева — импровизированная приборная панель и окошко с большим количеством информационных вкладок, перечисление которых требует отдельного материала. Сильно интересующихся или владельцев схожих устройств уже с этой точки можно отправлять к официальному мануалу на ArduPilot Mega (русский и английский).
Но замечу что с коробки квадрокоптер отлично настроен, так что кто не любит ковырять настройки квадрокоптера, программу можете и не скачиват.
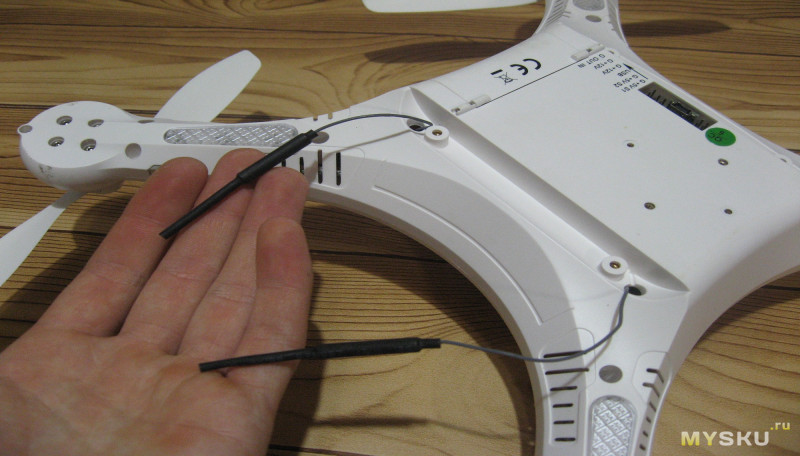
Две антенны идущих с приемника.
Устанавливаем шасси которое крепится посредством двух винтов.

С антенной связи будьте осторожны и постарайтесь не передавить провод идущий к приемнику.
Антенны необходимо зафиксировать пластиковой стяжкой или узким скотчем к шасси квадрокоптера.

Общий вид квадрокоптера сверху. На большой печатной плате, которая играет роль распределителя питания установлены: ArduPilot Mega 2.5.2 (белая коробочка в центре, мозги квадрокоптера) и связка из приемника радиоуправления и GPS-моудля с антенной (слева).

Замечу что корпус собран довольно качественно и при том имеет влитые резьбы под болтики, а не саморезы вогнанные в пластмассу.
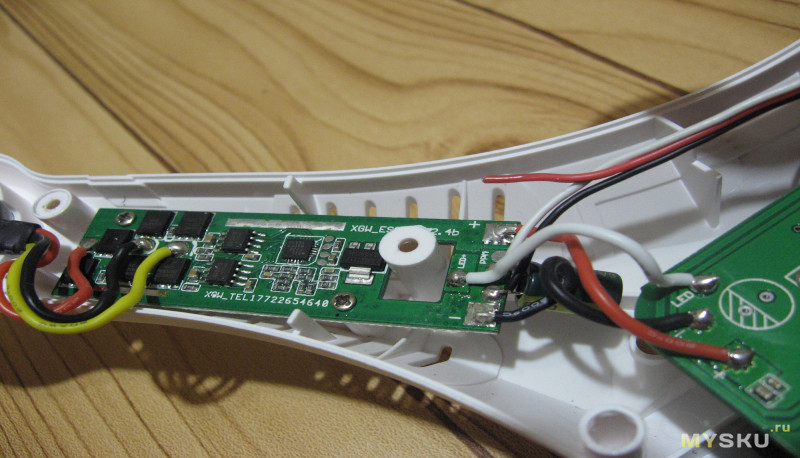
Регуляторы оборотов собраны на полевых транзисторах TPCA8057-H

GPS модуль BN-880 — отдельно на его сделал обзор mysku.club/blog/china-stores/42838.html

Микроконтроллер STM8S003F3. Именно он управляет зуммером (пищалкой) и габаритными светодиодами. Теперь понятно почему у CX-20 не работает Failsafe-режим при низком уровне заряда аккумулятора. Силовая часть и полетный контроллер максимально развязаны, а мониторингом напряжения на аккумуляторе и вовсе занимается отдельный микроконтроллер, который никак не связан с «мозгами»
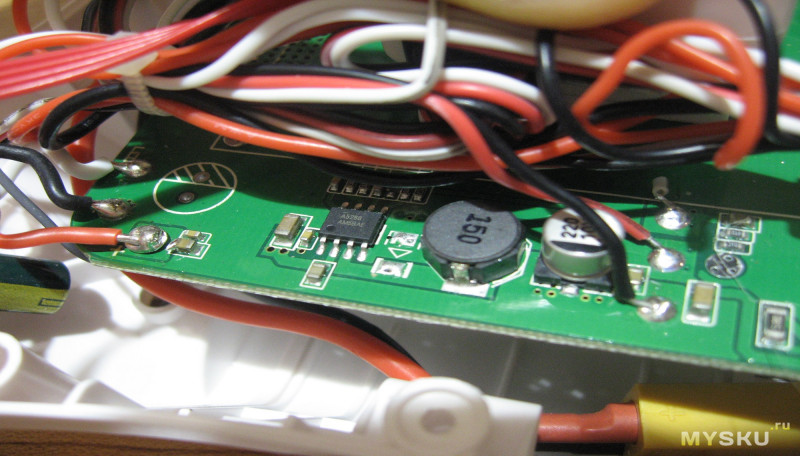
В распредплату интегрирован понижающий преобразователь (MP1593) для питания всей бортовой электроники.
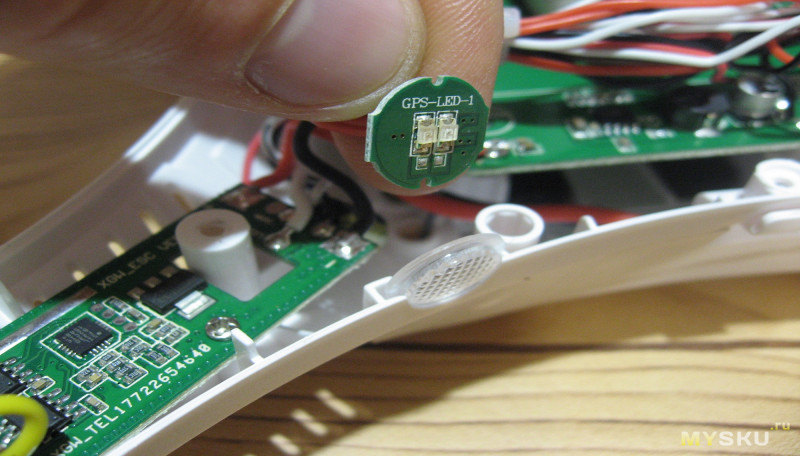
SMD светодиоды, оповещающие о режиме входа в калибровку и готовности к полету.
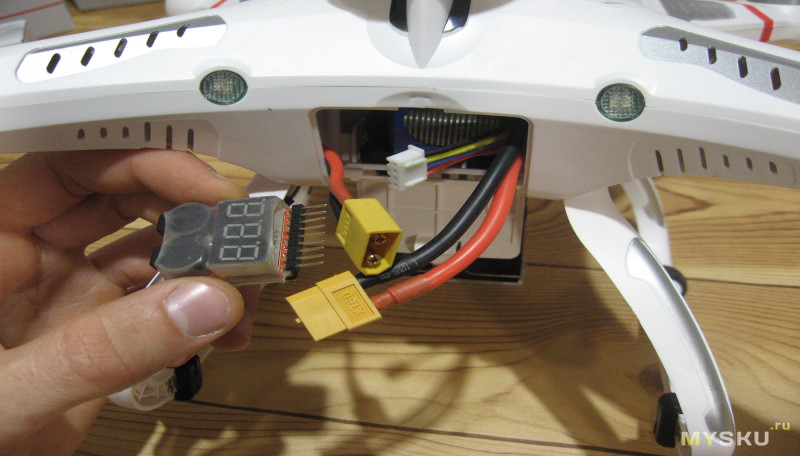
Рекомендую использовать сигнализатор разряда аккумулятора, конечно внутри квадрокоптера имеется свой сигнализатор имеющий только один бузер, но не всегда вы его можете не услышать, но увидеть как квадрокоптер остановил моторы и рванул камнем вниз.

Калибруем компас перед каждым полетом
1. Вставляем аккумулятор и соединяем разъемы.
2. Включаем аппаратуру управления и переводим правый стик в нижнее-правое положение. На все про все есть 5 секунд, по истечению которых режим калибровки перестанет быть доступным и придется вернутся к первому пункту.
3. Дождитесь пока левый индикатор начнет попеременно мигать красным и желтым цветом. Постоянное свечение правого светодиода ожидать не обязательно.
4. Собственно сама калибровка. Возьмите квадрокоптер «носом от себя» и повернитесь вокруг своей оси 3-5 раз, затем опустите нос коптера и совершите еще 3-5 оборотов*. Направление вращения роли не играет.
5. Опускаем квадрокоптер на землю и отключаем питание(!). Не обращайте внимание на продолжающий мигать красно-желтый светодиод — просто отключите питание и все настройки сохранятся автоматически.
*Этот вид калибровки более свойственный DJI Phantom с его полетным контроллером Naza. APM же принято калибровать следующим образом. И да, при калибровке старайтесь минимизировать влияние магнитных помех (электросети, автомобили и любые другие устройства генерирующие магнитные поля).

Полетные индикаторы квадрокоптера:
— мерцание желтого и зеленого — вход в режим калибровки;
— мерцание зеленого цвета говорит о поиске GPS сигнала;
— свечение зеленого цвета говорит о найденных GPS сигналах.


Преимущества и недостатки
— Привлекательная цена
— Полетный контроллер с открытым исходным кодом и возможностью настройки большинства параметров
— Полный набор сенсоров для уверенной стабилизации квадрокоптера в воздухе
-Тугой коннектор питания
-Отсутсвие failsafe-режима по питанию
— Вероятность брака компонентов выше чем у DJI (особенно по части АКБ)
Полезные ссылки
CX-20 на Multicopter Wiki.
Обсуждение CX-20
Квадрокоптер на официальном сайте
Альтернативная инструкция по запуску CX-20 на русском языке
База знаний ArduPilot Mega
Краткий FAQ по первому вылету CX-20

Видео распаковки и сборки квадрокоптера.
Видео с демонстрацией полетных режимов + тест дальности РУ.
Камеру использую FiIREFLY S6 (камера в комплект квадрокоптера не входит)
В публикации с использованием текста. Просто сослаться на использование материалов автора блога nnmlab.com
На этом все, есть вопросы спрашивайте.
Товар для написания обзора предоставлен магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Quanum Nova — это не только ребрендинг Cheerson CX-20, но и небольшая доработка, которая выглядит в виде выводов питания, USB разъема и управления подвесом на дно корпуса квадрокоптера.
В остальном эта инструкция подходит как для Quanum Nova, так и для Cheerson CX-20.
Если вы решили купить квадрокоптер Quanum Nova, то смотрите эту статью.
В комплекте с Новой идет инструкция на английском языке. Я не буду переводить ее полностью, только значимые части, плюс добавлю то, что я узнал на практике полетов на этом квадрокоптере.

Итак, первое с чего начинается подготовка к полету в поле — это установка винтов.
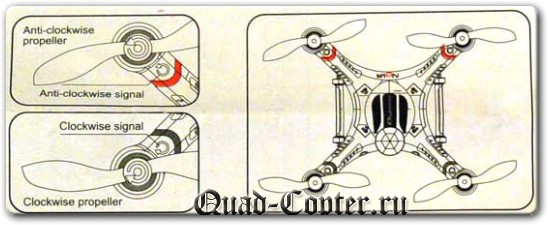
На корпусе квадрика Нова и на винтах есть нарисованные стрелки, ставим винты совпадающими стрелками и закручиваем гайки. Внимание! Гайки разнонаправленные — так что не потеряйте их при попытке закручивания!
Гайки обязательно протяните ключом идущим в комплекте. Это надо делать каждый полетный день перед первым полетом! Открутившаяся гайка (а может, хоть и самозатягивающиеся) грозит падением и поломкой квадрокоптера.
Что означают мигающие лампочки на квадрокоптере Quanum Nova
Если смотреть на квадрокоптер Quanum Nova сзади, то левая лампочка может мигать красным или желтым, правая — зеленым.
Правая (зеленая) отвечает за GPS. Она мигает когда спутники не найдены или их недостаточно (менее 6) для автоматических режимов полета.
Левая — мигает красным когда двигатели квадрокоптера не активны (при движении стика газа квадрик не начнет вращать винтами), горит — когда квадрик готов к полету. Желкто-красное мигание означает переход квадрокоптера в режим калибровки.
Снизу и сверху квадрокоптера расположены навигационные огни. Передние огни красные, задние зеленые. В ярких солнечный день индикаторов не видно. Так что первые полеты лучше проводить при начале сумерок — когда только-только начинает темнеть.
Если в полете мигают индикаторы и раздаются звуковые сигналы — значит аккумулятор садится и пора заходить на посадку.
Как подготовить квадрокоптер Quanum Nova к полету

1. Необходимо вставить заряженный аккумулятор и соединить разъемы.
2. Если вы в этом месте не летали в прошлый раз — выполните калибровку. Выполненная калибровка — гарантия того, что квадрокоптер не улетит неведомо куда.
3. Не трогая квадрокоптер дождаться когда отмигается и загорится правый зеленый светодиод. Это означает, что спутники найдены и возможен полет в автоматических режимах.
4. Переведите переключатели в верхнее положение, стик газа в нижнее и включите пульт.
5. Сдвиньте стик газа в нижне-правое положение — через секунду квадрокоптер мигнет обоими светодиодами и красный диод перестанет мигать.
6. Нова готов к полету.
7. Взлетать и садиться лучше в ручном режиме!
8 После посадки переведите стик газа в нижне-левое положение и дождитесь пока красный индикатор не станет мигать — теперь двигатели не запустятся и можно отключать питание.
.jpg)
Как произвести калибровку Quanum Nova
Mode2 (газ слева)
Подсоедините питание к квадрокоптеру. Включите передатчик и переведите правый стик в нижне-правое положение (левый стик газа должен быть внизу еще при включении питания). У вас есть 5 секунд от включения питания для того, что бы это сделать. После этого времени квадрик не желает переходить в режим калибровки. Я как то час убил в поле, прежде чем понял в чем причина (все дожидался окончания поимки спутников и после этого пытался перевести его в калибровку).
Mode1 (газ справа)
Подсоедините питание. Переведите левый стик вниз, правый стик вниз и вправо, а теперь и удерживая их в этом положении включите питание передатчика. Сложновато, в моде2 вход в калибровку проще, так как левый стик внизу удерживается самостоятельно.
Калибровка
В режиме калибровки левый индикатор мигает красно-желтым цветом. Для калибровки возьмите квадрокоптер «носом от себя» и повернитесь вокруг 3-5 раз, затем опустите нос квадрокоптера вертикально вниз и еще 3-5 кружочков.
После окончания калибровки поставьте квадрокоптер горизонтально и отключите питание, настройки запомнятся для данной местности.
Upd! Мигание при окончании калибровки квадрокоптера не отключается.
Посмотрите видео с примеров калибровки квадрокоптера Quanum Nova.
Калибровка гироскопов квадрокоптера Nova и CX-20
Иногда квадрокоптер в «ручном режиме полета» начинает сносить даже при отсутствии ветра, что бы этого избежать необходимо выполнить калибровку гироскопов.
Для того, что бы выполнить калибровку гироскопов, необходимо после проведения калибровки компаса, сделать следующее:
1. Включить квадрокоптер
2. Левый стик перевести в положение «вправо и вниз»
3. Удерживать стик в этом положении в течении 15-20 секунд пока оба индикатора не начнут мигать (левый желтым и красным попеременно, правый зеленым).
4. Необходимо взлететь и в течении примерно 20-30 секунд удерживать квадрокоптер в одной точке.
5. Посадить квадрокоптер и отключить питание.
Все, гироскопы откалиброваны и можно летать. На видео выше эта операция показана примерно на первой минуте видеоролика.
Калибровка регуляторов квадрокоптера Nova и CX-20
Калибровку регуляторов можно сделать или через 3 канал (подключая провода регуляторов к нему по очереди) или путем поочередного отключения плат регуляторов.
Я подобрал наиболее простое видео (на мой взгляд) по калибровке регулей на данном квадрокоптере.
Полетные режимы Quanum Nova

Переключатели полетных режимов находятся по краям передатчика и подписаны SWB и SWA соответственно.
| SWB | SWA | |
|---|---|---|
| Ручной режим | 0 | 0 |
| Удержание позиции | 0 | 1 |
| Удержание направления | 1 | 1 |
| Удержание высоты | 1 | 2 |
| Возврат в точку взлета | 0 | 2 |
Ручной режим — работают только гироскопы. Управление весьма резкое для новичка.
Удержание позиции — квадрокоптер пытается висеть в одной точке, на движения стиков реагирует с запозданием, может «болтаться» +-0.5 метра. Не рекомендуется для городских полетов! Отраженный от дома сигнал от GPS спутника может заставить квадрокоптер вдруг полететь куда угодно.
Удержание направления — квадрокоптер запоминает свое положение и может лететь по прямой (левый стик вперед) с одновременным вращением вокруг своей оси (левый стик вбок).
Удержание высоты — Нова удерживает высоту. На стик «газа» реагирует, может снижаться или возвышаться. Но, когда ручка газа в центре — держит высоту самостоятельно, правым стиком можно при этом рулить, левым изменять высоту и вращать коптер. Нет просадок по высоте при резких маневрах. Рекомендуется новичкам, для видеосъемки и FPV полетов.
Возврат в точку взлета — в этом режиме кварокоптер возвращается к точке взлета (места где подсоединилось питание и произведен поиск спутников GPS). Остается на высоте ожидая команд с пульта-передатчика.
Автономные режимы квадрокоптера Quanum Nova

Потеря связи с передатчиком — при потере связи с передатчиком Quanum Nova возвращается в точку взлета, туда где была произведена привязка к GPS. Возвращается по прямой, облетать дома, деревья и прочие помехи не умеет — так что будьте осторожны. Садится +-0.5 метра от точки привязки. Вернуть управление при потере связи можно следующим образом: SWA в позицию «0», затем в «1» и снова в «0».
Низкое напряжение аккумулятора — Нова предупреждает о низком напряжении миганием и писком. Если вы не отреагировали, то после сильной просадки напряжения квадрокоптер просто упадет в том месте где летит. К сожалению, защита от низко напряжения только информирует писком, но, никак не действует на полетные режимы (проверял в поле и квадрик упал с полуметра высоты)
Как вернуть управление квадрокоптером Nova
Считается, что после потери связи с передатчиком вернуть управление на квадрокоптере Nova нельзя.
Однако это не так!
Дело в том, что в инструкции об этом ничего не сказано, но, тут подходит инструкция от CX-20:
Для отмены автоматического режима «Return to Home» необходимо перевести переключатель SWA в позицию «0», затем в «1» и снова в «0».
После этого квадрокоптер снова стане управляемым.
Я таким образом неоднократно перехватывал управление после того, как Nova вернется в точку взлета и начнет снижаться для посадки.
Процедура перехвата не работает только в случае если вы отключите и снова включите передатчик — после такого необходимо заново отключить и включить питание на квадрокоптере.
Внимание! Убедитесь в том, что перед перехватом управления стик газа находится в средней позиции или чуть выше! Управление переходит в «Ручной режим» и если газ будет в нижней позиции — квадрокоптер просто упадет!
Вот вроде бы и все, что надо знать для начала полетов. Еще квадрокоптер Нова можно подключать к компьютеру и через программу Mission Planer задавать полет по точкам на карте, менять штатные настройки и режимы полетов. Это большие темы и требуют отдельных статей. Часть общей информации можно подчерпнуть в коптеровской Вики.
Перед тем, как изменять настройки квадрокоптера — сохраните их на своем компьютере!
Если вы этого не сделали, то можно скачать оригинальные настройки Quanum Nova.
Доработки квадрокоптера Nova
Для улучшения автоматической посадки квадрокоптера на неровный грунт необходимо увеличить расстояние между крайними точками посадочных опор.
|
|
Вы можете скачать STL файл и распечатать на 3D принтере и пристегнуть их пластиковыми стяжками или «кольцом-липучкой». Скачать файл для 3D принтера можно тут. Идея конструкции весьма проста, так что, если у вас нет 3D принтера — то можно изготовить подобное улучшение посадочного шасси из подручных предметов. |

Появился STL файл шасси для полетов с подвесом.
|
|
Это шасси позволяет летать с подвесом для экшен камеры. Штатное коротковато и камера цепляется за землю. Кроме этого, ноги штатного шасси попадают в кадр. В этом варианте обе проблемы решены. Скачать STL файл шасси для квадрокоптера Nova или CX-20 можно тут. |

Если у вас есть вопросы — задавайте их в комментариях. Обязательно отвечу и доработаю статью!
Похожие статьи:
Использование квадрокоптеров → Как не потерять квадрокоптер
Для видеосъемки → Обзор Walkera TALI H500 12-CH
Для видеосъемки → Обзор квадрокоптера Cheerson CX-20
Инструкции для квадрокоптеров → Инструкция и обзор для квадрокоптера WLtoys V303
DJI квадрокоптеры → Обзор квадрокоптера DJI Phantom
Инструкции для квадрокоптеров → Инструкция на русском для WALKERA QR X350
Для видеосъемки → Обзор квадрокоптера Quanum Nova
Инструкции для квадрокоптеров → Инструкция на русском для квадрокоптера DJI Phantom 2
Обсудить на форуме